
Retracts
How to make a u/c sequencer (it's easy!)
Introduction to sequencers
Sequencers are used to orchestrate the motions of servos. Typical applications are undercarriage doors and wheels, swing wing systems, turbine startup sequences, and bomb dropping mechanisms.
In this article I describe a generic method for creating a sequencer in Ethos. Unlike other methods you might see on YouTube, it doesn't rely on logical switches. Instead, it uses an intuitive time based system.
The method is very simple - yet it supports complex motions with unlimited outputs.
- Transit time 0 - 50 seconds
- Up to 20 linear motion segments per output
- Unlimited outputs
Simple timebase method
The method uses just two generic elements:
- A timebase controlled by a switch
- A time/position curve for each servo
So let's get started with a real life example...
Example: undercarriage sequencer
As an example, we'll create a sequencer for a retractable undercarriage. We'll use two servos - one the door and one for the gear. The retract switch is SF.
- SF↓ - 1 - Doors open 2 - Pause. 3- Gear drops. 4 - Pause. 5 - Doors close.
- SF↑ - reverse of above
- Transit time: 6 seconds
Sound tricky? Well no, it's actually pretty simple! In the following sections we'll build a complete solution.
Create the time base
The timebase is driven by the retract switch SF.
First, create a FreeMix with source = SF. Set the output to CH4. Set slow-up and slow-down to 3 seconds (half the transit time).
FreeMix: Name=Timebase, Source=SF, Weight=100%, Slow↑↓=3 secs Output=CH4
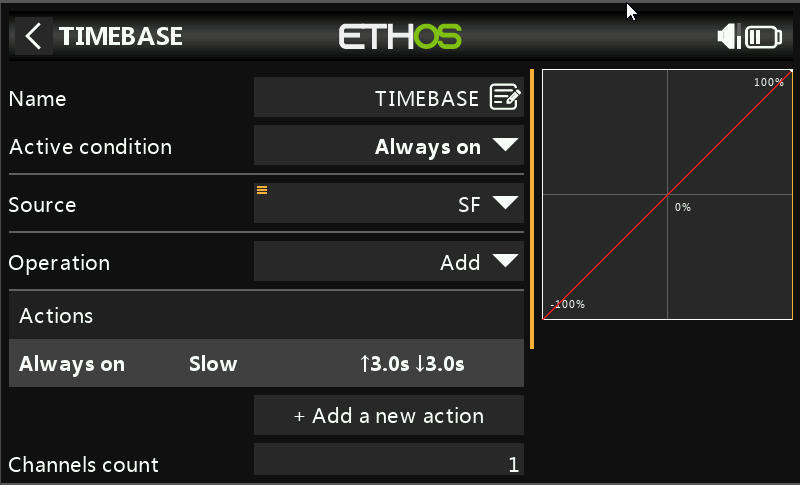
Timebase mix with slow action (Ethos 1.5).
If using 1.4, just set the 'slow' options in the FreeMix.
Create mixers for door and gear
Now create two Free mixes for the door and gear. The source of each mix is the timebase channel (CH4). Each mix has a single output:
FreeMix: Name=Door Source=CH4:Timebase, Weight=100%, Output=CH1
FreeMix: Name=Gear Source=CH4:Timebase, Weight=100%, Output=CH2
If you try it, you'll see that both outputs follow the timebase, that is to say they ramp between -100% and +100% over 6 seconds as SF is switched.
Create the motion curves
Finally, create the curves describing the motions of the door and gear. These will be inserted into the door and gear mixers we created above.
The door curve should have 6 points, and the gear curve 4 points - the reasons will become clear. The curve points are as follows:
- x = −100% => y = target output for SF↑
- x = +100% => y = target output for SF↓
- Intermediate points define the trajectory
Each segment of the curve will describe a movement, pause or jump. The steeper a segment, the faster the movement. A horizontal segment generates a pause. A vertical segment generates a jump.
Here are the curves for our example. Note that the curves are delineated in red:
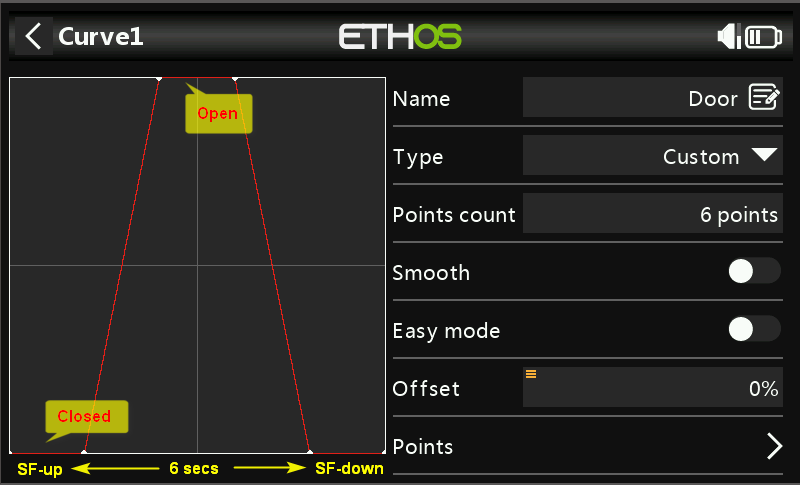
SF↓: doors open at ~1.5 secs, then close at ~4.5 secs.
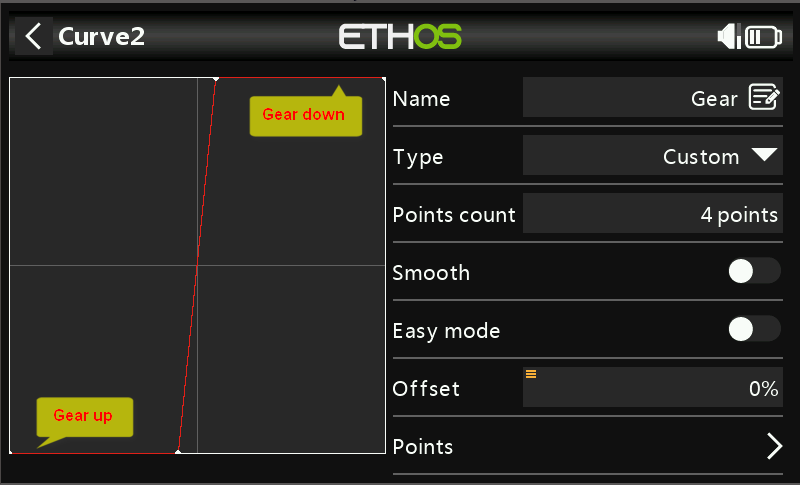
SF↓: gear drops at 3 sec mark (while doors are open).
Now insert the motion curves into the corresponding mixers
FreeMix: Name=Door Source=CH4:Timebase, Weight=100%, Curve=CV:Door, Output=CH1
FreeMix: Name=Gear Source=CH4:Timebase, Weight=100%, Curve=CV:Gear, Output=CH2
And ... voilá, that's it!
Adjusting the servo limits and centres
The servo directions, travels and centres should be adjusted in the Outputs menu. The mixer weights should remain unchanged at +100%.
Maintaining sync at startup
The retract switch and servos must be in sync when the radio is switched on, otherwise the servos will jump suddenly potentially causing a clash. This is not a limitation of this particular sequencing method... it's because our radios cannot know the actual position of a servo.
To maintain sync, always (a) put the u/c in a given state (retracted or deployed) before switching off, and (b) put the retract switch in the corresponding state when the radio is switched on - this can be done via Ethos' switch checks.
Video example: 'Crazy crow' sequencer
Here's an example which demonstrates the flexibility of the technique. The video shows a sequencer driving four sets of outputs with a mixture of slow and instantaneous movements, as well as pauses. Keep an eye on the timebase in CH9, shown at bottom right. This one is not for flying :-)